هوش مصنوعی مولد، رباتها را یک قدم به هدف کلی نزدیکتر میکند

بیشتر پوشش های روباتیک انسان نما به طور قابل درک بر طراحی سخت افزار متمرکز شده است. با توجه به دفعاتی که توسعه دهندگان آنها عبارت "انسان نماهای هدف عمومی" را دور می زنند، باید به بیت اول توجه بیشتری شود. پس از دههها استفاده از سیستمهای تک منظوره، جهش به سیستمهای تعمیمیافتهتر بسیار بزرگ خواهد بود. ما فقط هنوز آنجا نیستیم.
تلاش برای تولید یک هوش رباتیک که بتواند به طور کامل از گستره وسیع حرکات باز شده توسط طراحی انسان نما دوپا استفاده کند، موضوعی کلیدی برای محققان بوده است. استفاده از هوش مصنوعی مولد در رباتیک نیز اخیراً موضوع داغی بوده است. تحقیقات جدید MIT نشان می دهد که چگونه دومی ممکن است عمیقا بر اولی تأثیر بگذارد.
یکی از بزرگترین چالش ها در مسیر سیستم های همه منظوره آموزش است. ما درک کاملی از بهترین شیوه ها برای آموزش انسان ها برای انجام کارهای مختلف داریم. رویکردهای روباتیک اگرچه امیدوارکننده است، اما پراکنده است. روشهای امیدوارکننده زیادی از جمله تقویت و یادگیری تقلیدی وجود دارد، اما راهحلهای آینده احتمالاً شامل ترکیبی از این روشها خواهد بود که با مدلهای هوش مصنوعی مولد تقویت میشوند.
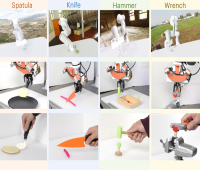
یکی از موارد استفاده اصلی که توسط تیم MIT پیشنهاد شده است، توانایی جمعآوری اطلاعات مرتبط از این مجموعه دادههای کوچک و مختص کار است. این روش ترکیب سیاست (PoCo) نامیده شده است. این وظایف شامل اقدامات مفید ربات مانند کوبیدن به میخ و چرخاندن چیزها با کاردک است.
مدرسه خاطرنشان می کند: "[محققان] یک مدل انتشار جداگانه برای یادگیری یک استراتژی یا خط مشی برای تکمیل یک کار با استفاده از یک مجموعه داده خاص آموزش می دهند." سپس آنها سیاست های آموخته شده توسط مدل های انتشار را در یک خط مشی کلی ترکیب می کنند که یک ربات را قادر می سازد چندین کار را در تنظیمات مختلف انجام دهد.
طبق MIT، ادغام مدلهای انتشار عملکرد کار را تا 20% بهبود بخشید. این شامل توانایی اجرای وظایفی است که به ابزارهای متعدد نیاز دارند، و همچنین یادگیری/انطباق با کارهای ناآشنا. این سیستم قادر است اطلاعات مربوطه را از مجموعه داده های مختلف در زنجیره ای از اقدامات مورد نیاز برای اجرای یک کار ترکیب کند.
لیروی وانگ، نویسنده اصلی مقاله، او میگوید : «یکی از مزایای این رویکرد این است که میتوانیم سیاستها را برای به دست آوردن بهترینها از هر دو جهان ترکیب کنیم. به عنوان مثال، یک خط مشی آموزش داده شده بر روی داده های دنیای واقعی ممکن است بتواند به مهارت بیشتری دست یابد، در حالی که یک خط مشی آموزش دیده بر روی شبیه سازی ممکن است بتواند به تعمیم بیشتری دست یابد.
هدف این کار خاص، ایجاد سیستمهای اطلاعاتی است که به روباتها اجازه میدهد تا ابزارهای مختلف را برای انجام وظایف مختلف با هم عوض کنند. گسترش سیستم های چند منظوره صنعت را یک قدم به رویای همه منظوره نزدیک تر می کند.
برچسبها
|
|






ارسال نظر