ماهیچه های الکتروهیدرولیک به این پاهای ربات کمک می کند روی زمین های ناهموار صاف بایستند

محققان ETH Zürich در ایستادن روبات ها بسیار خوب هستند. در سال 2022، تیم رباتیک مدرسه به ربات چهارپا ANYmal آموزش داد که چگونه بدون سقوط از کوه بالا برود. تحقیقات جدید این مدرسه که با همکاری موسسه ماکس پلانک مستقر در اشتوتگارت برای سیستمهای هوشمند منتشر شده است، رویکردی منحصر به فرد برای مشکل عبور از زمینهای ناهموار دارد.
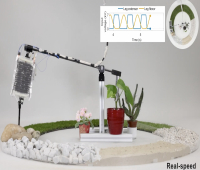
ماهیچه های مصنوعی که توسط مدارس به نمایش گذاشته می شوند توسط یک سیستم الکترو هیدرولیک هیبریدی نیرو می گیرند. همراه با قابلیت تنظیم خودکار با سطحی که در حال عبور هستند، پاها سریعتر حرکت می کنند و بالاتر از همتایان برقی استانداردتر خود می پرند، همه اینها بدون نیاز به سنسور یا کنترل اضافی.
محرک های پاها به طرز شگفت آوری ساده هستند. تیمها آنها را بهعنوان «کیسههای پلاستیکی پر از روغن، شبیه به کیسههایی که برای ساختن تکههای یخ استفاده میشوند» توصیف میکنند. سپس آن کیسه ها با الکترودها پوشانده می شوند. راستش را بخواهید، کل ماجرا کمی شبیه یک پروژه علمی مدرسه به نظر می رسد.
توماس بوشنر، دانشجوی مقطع کارشناسی ارشد، می گوید: «به محض اعمال ولتاژ به الکترودها، آنها به دلیل الکتریسیته ساکن به یکدیگر جذب می شوند. به همین ترتیب، وقتی بادکنکی را به سرم میمالم، موهایم به خاطر همان الکتریسیته ساکن به بادکنک میچسبد.»
سپس کیسه ها بر اساس ولتاژ اعمال شده منبسط یا منقبض می شوند. برخلاف محرک های الکتریکی استاندارد، سیستم گرمای زیادی تولید نمی کند.
پس محرک ها به سیستم کمک می کنند تا از زمین های ناهموار عبور کند و به آن کمک می کنند تا به ارتفاع بالا بپرد. با این حال، از نظر استفاده در دنیای واقعی، سیستم هنوز راه زیادی در پیش دارد.
در مقایسه با روباتهای راه رفتن با موتورهای الکتریکی، سیستم ما هنوز محدود است. کریستف کپلینگر، استاد موسسه ماکس پلانک، می گوید: پا در حال حاضر به یک میله متصل است، به صورت دایره ای می پرد و هنوز نمی تواند آزادانه حرکت کند. اگر پای رباتیک را در یک ربات چهارپا یا یک ربات انسان نما با دو پا ترکیب کنیم، شاید روزی که با باتری کار می کند، بتوانیم آن را به عنوان یک ربات نجات مستقر کنیم.
برچسبها
|
|





ارسال نظر